White Papers
Short, practical write-ups from the IAST team—engineering learnings, patterns, fixes, and real-world notes. New posts are added regularly.
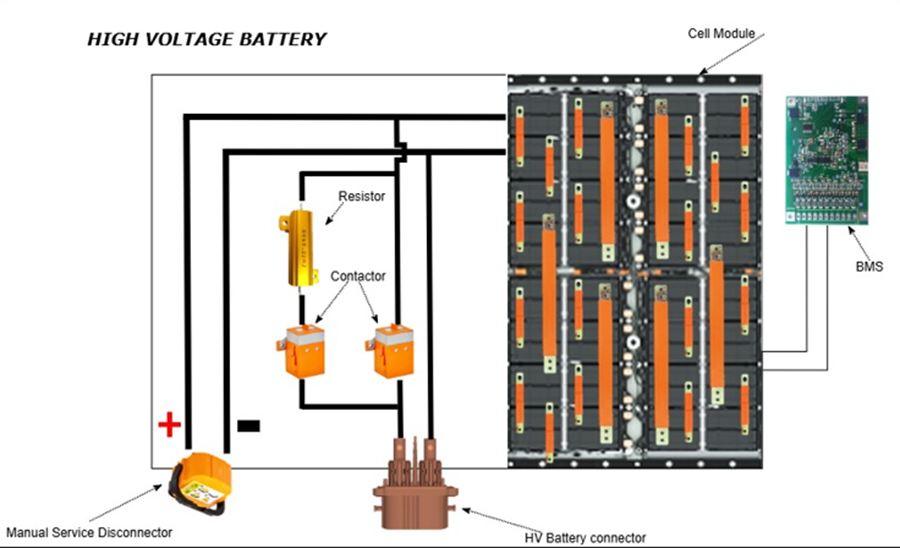
BMS Failsafe
Key engineering insights from designing a robust Battery Management System
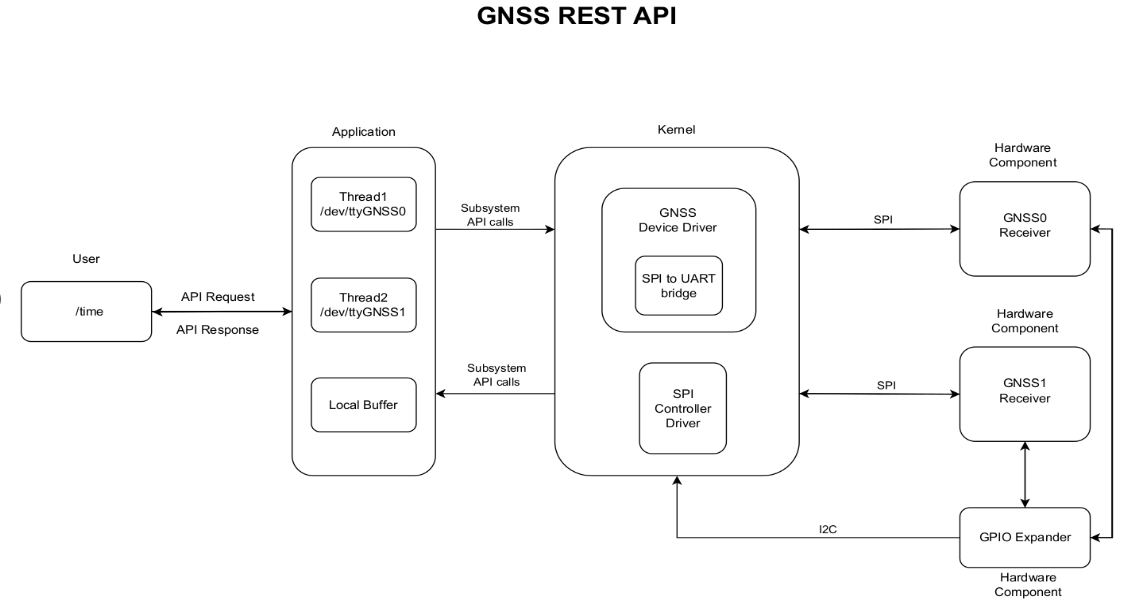
GNSS Time Management Framework
Boot-time GNSS initialization + UBX-only configuration + UTC time REST API for vehicles.
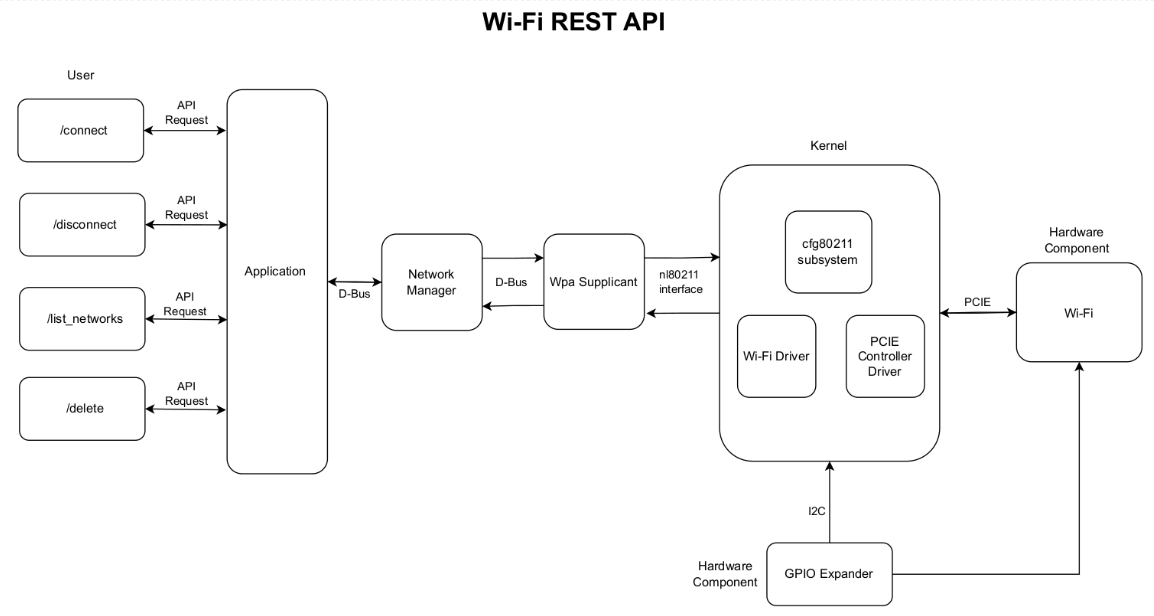
V2I Wi-Fi Network Management
REST APIs + monitoring + auto-reconnect + network failover for connected vehicles.

Secure SSD Management
REST-based storage operations with encryption, access control, mount checks, and audit logging.
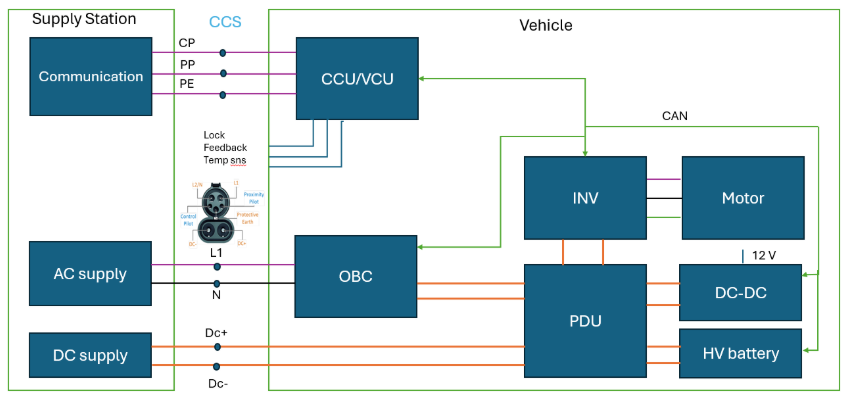
OBC: V2G & V2L Systems
Bi-directional on-board charging architecture enabling Vehicle-to-Grid and Vehicle-to-Load functionality.
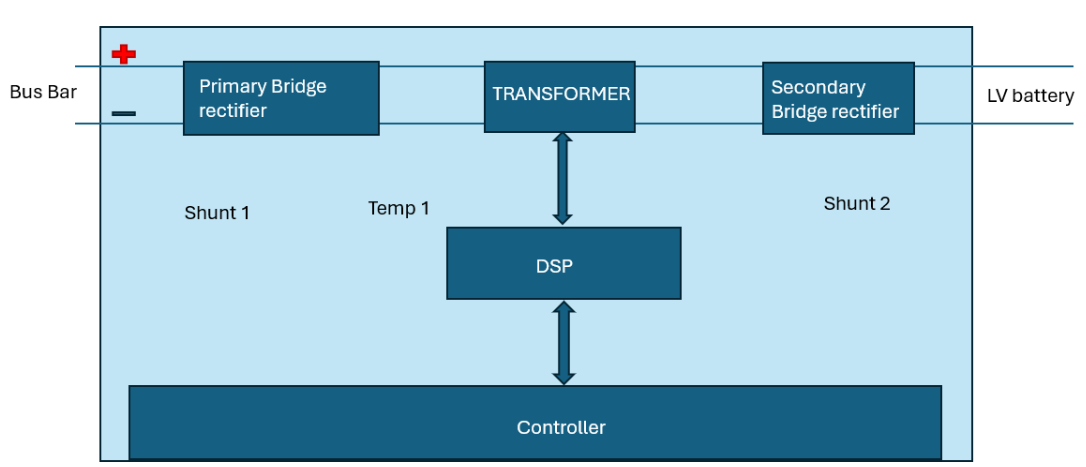
DC-DC: 800V
Bidirectional converter concept for 800V HV battery → 12V LV systems with ISO 26262 safety strategy.
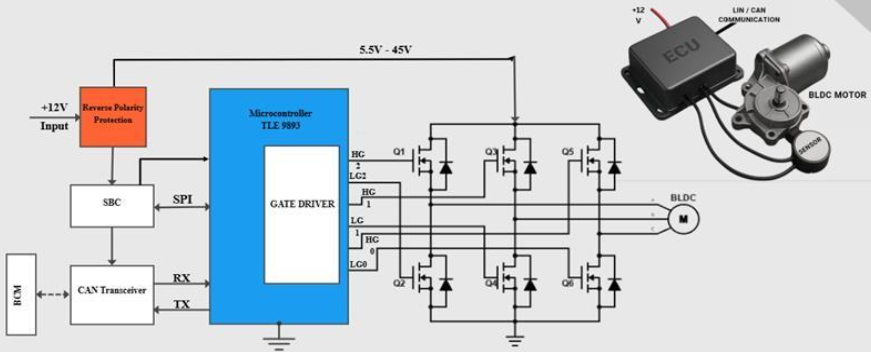
BLDC Motor Control – MOTIX™ TLE9893
AUTOSAR-aligned generic PoC for hall-sensor BLDC control with diagnostics, bootloader & lifecycle management.
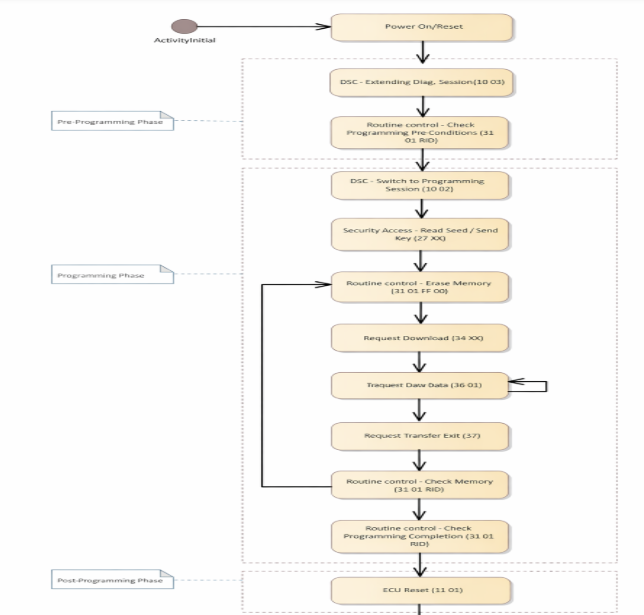
Bootloader Flash V&V
Requirement-based validation of UDS flashing: erase, download, CRC check, reset.
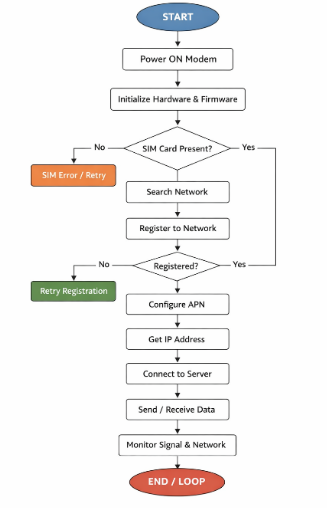
Cellular Modem V&V
Structured validation ensuring secure and stable LTE connectivity for telematics.
Wi-Fi Module Validation
Requirement-based verification of Wi-Fi enable, scan, connect, IP assignment, and stability monitoring.
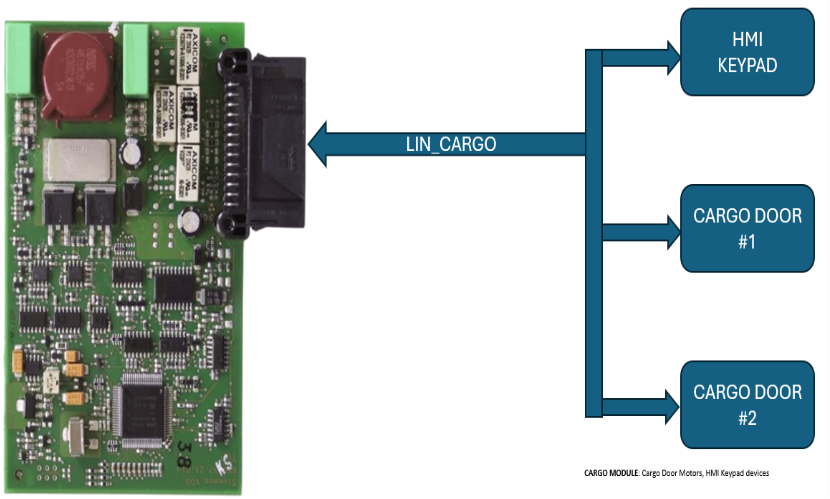
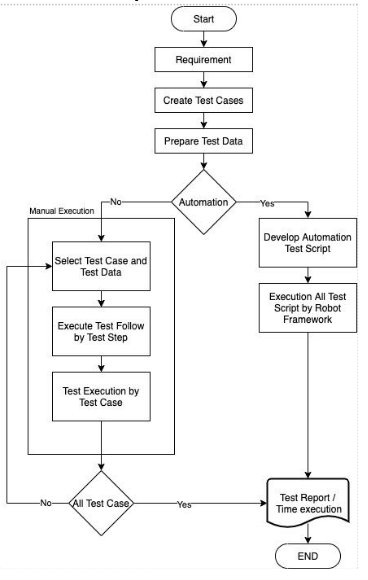
LIN Module Functional Validation
Requirement-based LIN communication verification ensuring stable and deterministic ECU network behavior.
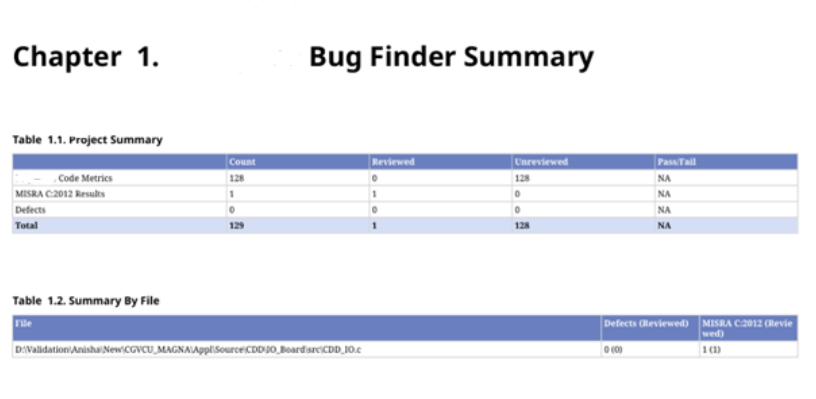
Code Safety & MISRA Compliance
Static code analysis for early defect detection, MISRA compliance, and improved embedded software safety.
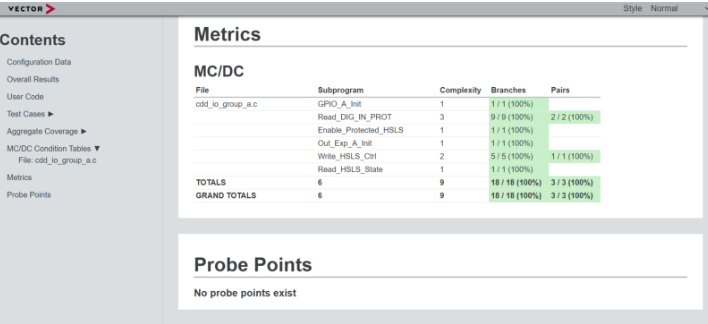
100% Structural Coverage in C++
VectorCAST-driven verification ensuring Statement, Branch, and MC/DC coverage for safety-critical systems.
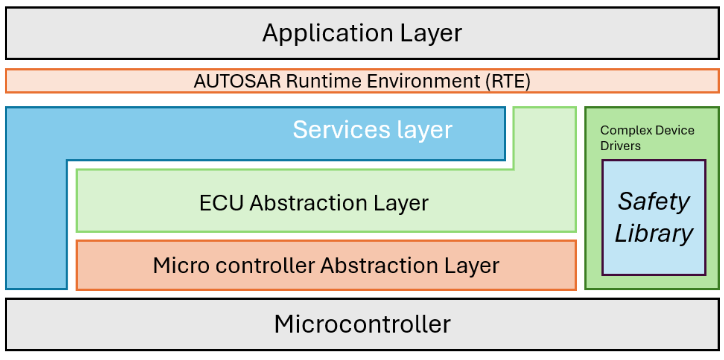
EGAS Level 3 Monitoring
Vendor-specific safety library integration for hardware monitoring, diagnostics, and safe state handling.
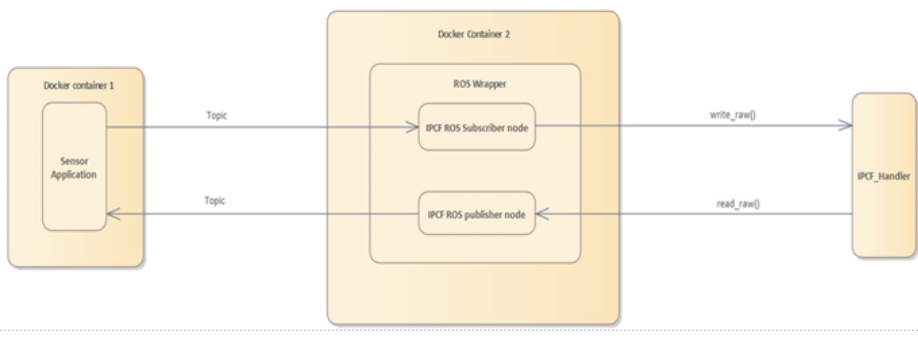
ROS 2 IPCF Integration
Low-latency bidirectional communication between Cortex-A53 and Cortex-M7 using ROS 2 and IPCF.
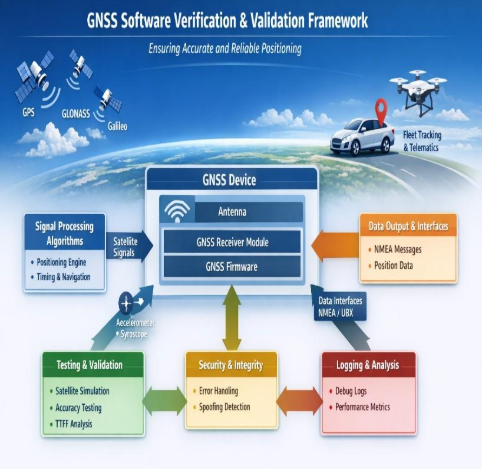
GNSS Verification & Validation
Structured GNSS firmware and satellite acquisition validation ensuring accurate and reliable positioning.

Functional Safety for Autonomous EV Bus
ISO 26262-based safety engineering for an L4 autonomous, zero-emission EV bus platform using drive-by-wire systems.

Gateway ECU: Fail-Safe Design
ISO 26262-based functional safety activities for base software of a central gateway ECU in an autonomous delivery bot.
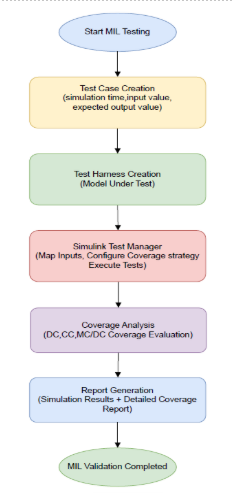
Model-in-the-Loop (MIL) Validation
Early-stage validation of automotive application software using model-based development to reduce integration risks and improve software maturity.
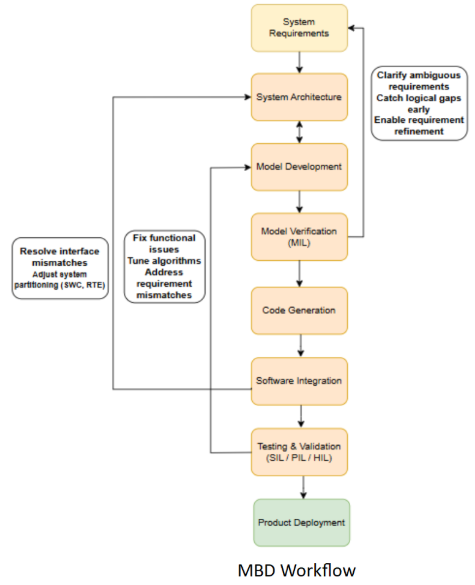
Automotive Model-Based Application Software Engineering
Scalable, safety-aligned gateway application software development using MBD, AUTOSAR, and structured engineering processes.
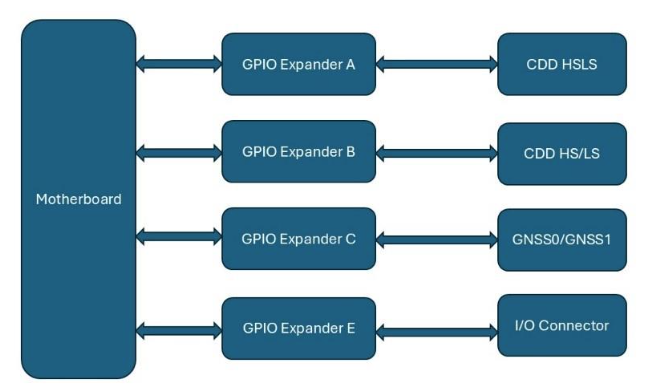
GPIO Expander Qualification Testing
Requirement-based verification of GPIO Expander behavior for initialization, configuration, interrupts, and runtime stability.
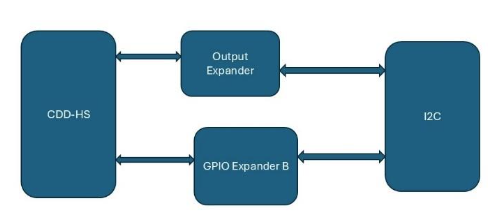
HS / LS / HSLS Driver Testing
Requirement-based verification of HS, LS, and HSLS driver modules covering communication, switching, and runtime stability.
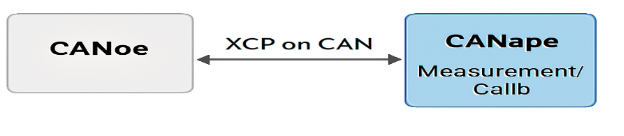
XCP Module Qualification Testing
Verification of XCP parameter mapping, ADC scaling, sensor validation, and runtime stability in embedded systems.
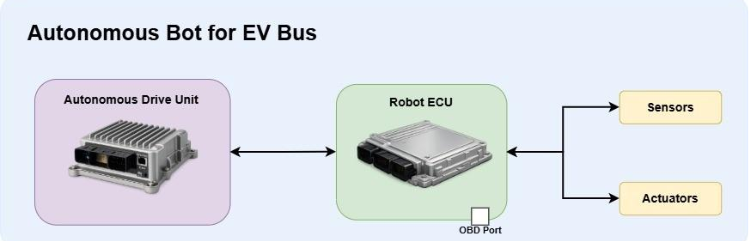
Autonomous Drive Bot for an EV Bus
ASIL D system engineering, software architecture, safety, and cybersecurity for a Level 4 zero-emission autonomous transit platform.